DUNE RCO – Deep learning for multi-technology fusion in industrial indoor asset localization and tracking
Idea and relation to VEDLIoT
Foreseeing an increase in the complexity of indoor positioning, DUNE addresses deep learning aided positioning fusion mechanisms at different stages of the localization process with the goal to deliver cost-effective and optimal indoor localization performance. Our models learn from diversified localization inputs and technologies to derive a real-time estimate of the asset’s location. DUNE relies on far-edge, edge and cloud distributed computing capabilities to address real time application needs, functionally splitting the fusion methods to also meet the time, performance, and scalability demands of common industrial applications.
DUNE will contribute to the VEDLIoT ecosystem extension with mainly 3 aspects:
- Sensor integration at the far-edge system, incorporating diversified and industrial positioning technologies as inputs to the technological framework.
- Deep Learning and Exact, Algorithmic and Geometric Models will be incorporated at the Model Zoos for third parties to build positioning systems relying on the framework.
- Demonstration that DL enabled edge architectures may become enablers for a next generation of indoor positioning technologies, thus extending the number of application use cases of the VEDLIoT project.
Objectives
- Consolidate an end-to-end multi-technology indoor positioning framework.
- Explore and evaluate the use of DL as a tool to improve existing art in positioning methods.
- Benchmark the performance of DL-based Direction-Finding methods against state-of-the-art methods.
- Contribute to the advance on DL-based positioning methods via the publication of open datasets and indoor positioning DL models in a public model Zoo.
- The publication of the obtained results in the target dissemination venues, aligning to the VEDLIoT dissemination strategy.
- Studying possible IPR protection approaches for the developed methods.
- Participation in the dissemination and exploitation activities of the VEDLIoT project, including our participation in the 4YFN at the MWC in Barcelona (2023).
Approach
The radio signals from the tags or cell phones attached to the object/person to be tracked are received by the antenna array of the locator. These raw samples, referred to as IQ samples, need to be transformed into the estimation of the angles that define the signal direction. In a perfect world, this transformation is a geometric process that depends on the inter-antenna spacing (distance) and the radio frequency (wavelength) and thus known phase variation for a given distance traveled by the wave. However, RF environments are subject to noise and non-linear irregularities due to interference and effects such as fading or multipath. When dealing with these effects, deep learning methods may become a valuable tool to derive accurate position estimations: They provide the ability to deal with non-linearity, versatile estimation approaches, and great classification capabilities (e.g., to distinguish between direct or reflected signals, thus acting as adaptive multipath filters). In our approach, the u.RECS node will be connected to the Direction finding system and use different NN models from those available in the model Zoo. We will benchmark these models against well-known methods such as classic beamforming or MUSIC algorithms.
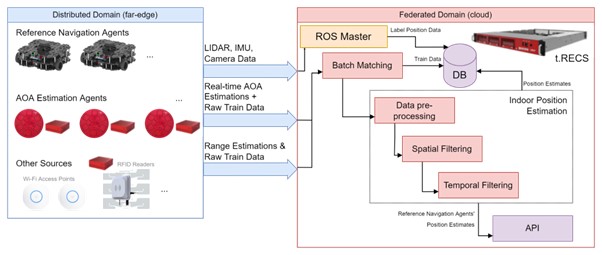
Considering a deployment in which several far-edge devices control different antenna arrays or other positioning technologies (e.g., RFID tags), the edge architecture (see Figure 3) will introduce a subsequent filtering step to exploit multi-technology, time, and spatial domain characteristics of the signal. An edge device, for example the t.RECS, will run different data fusion methods. Some of them will be based on projecting the inherent error of the technology as ellipses surrounding the estimated position and applying a computer vision algorithm to achieve a majority voting scheme, we refer to this method as confidence filtering. This approach can be further refined by using deep learning algorithms, trained to process the virtual images and obtain the points in the plane that better estimate the position of the objects under tracking as observed by the different locators.
Expected Impact
DUNE will contribute to the consolidation of indoor positioning technologies exploiting the capabilities of next generation CPS systems and distributed/federated architectures and building on the strong opportunity that deep learning can bring when enabled at the far-edge and edge of the infrastructure.